固緯電子電力電子教學小課堂 | 第二十五講: PEK-130模塊之三相正弦脈寬調變逆變器
PTS-系列之PEK-100系列教學
PEK-130模塊之
三相正弦脈寬調變逆變器
經過前幾期對于PTS-800中基本的電路圖拓撲結構的學習,我們已經掌握了基本的電路模型。從PEK-100系列開始,在固有電路拓撲基礎上開始對電路的控制方式進行學習。本期將針對直流變換器PEK-130對三相逆變器的數字控制進行教學與分析,為老師提供符合教學目標的實驗設備。

PEK-130
三相逆變器模組
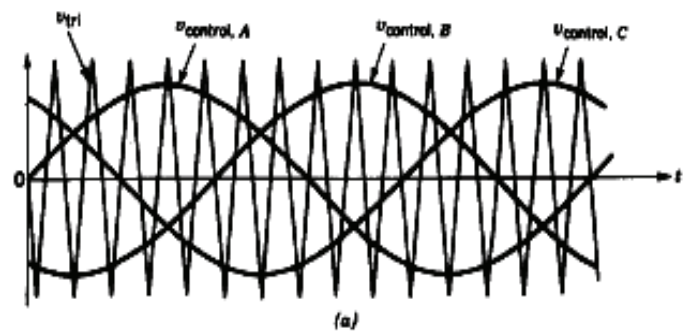
SPWM正弦脈寬度調變技術原理為由控制器產生的三相正弦波電壓命令與三角波做比較,經過比較器,產生脈寬調變訊號驅動逆變器,并使其輸出近似正弦波且為等幅不等寬的電壓波形。根據正弦波電壓和三角波的大小和頻率,可定義為下列兩個指標,其一為調變指標 (Modulaton Index)為:
式中Vcontrol為三相正弦波電壓峰值大小,Vtri為三角波峰值的大小。
其二為頻率調變比(Frequency modulation ratio),定義為:
式中fs為三角波頻率,f1為正弦波電壓頻率。
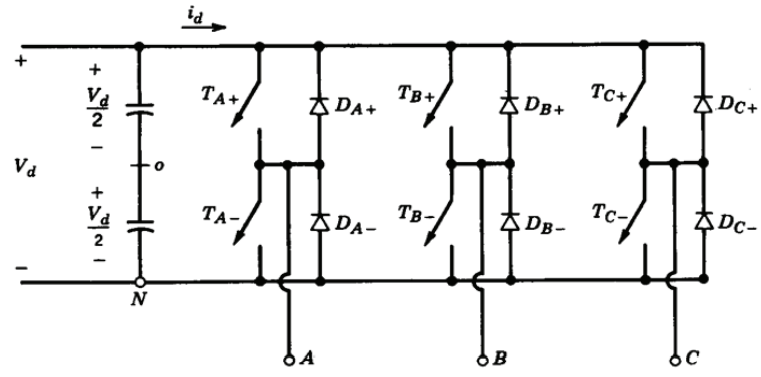
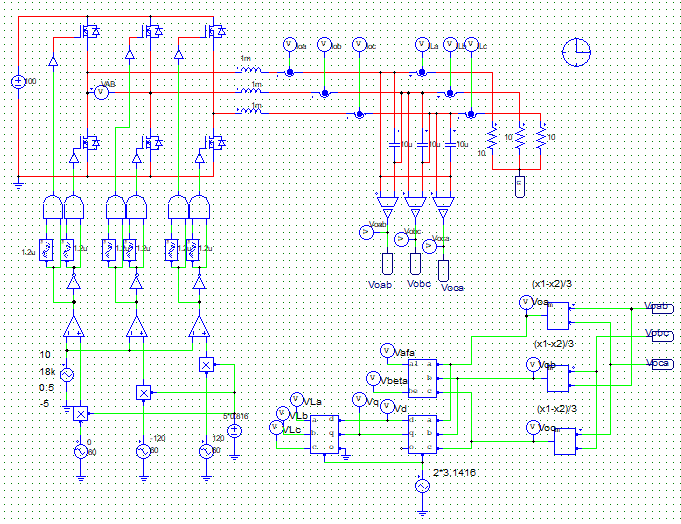
上圖為三相逆變器電路圖
三相SPWM:
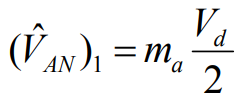
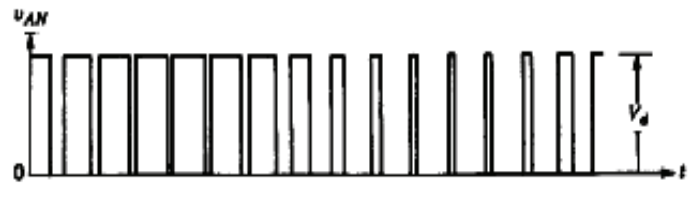
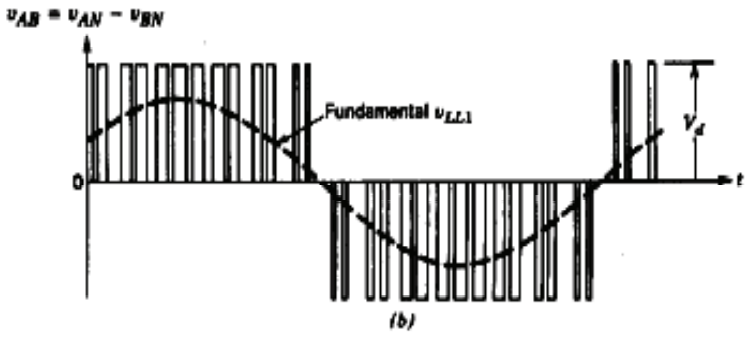
以A相為例,電壓VAN其基本波的峰值可用下式表示:
基本波線-線電壓大小(RMS)為:
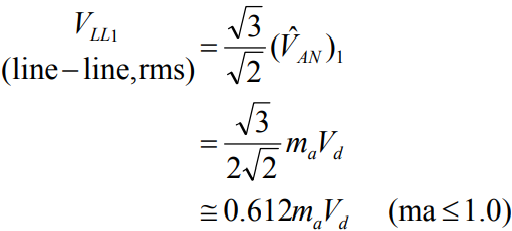
當ma≤1時,稱為逆變器的線性調變區,亦即當輸入正弦波電壓命令的峰值比三角波峰值小時,輸入電壓大小會與逆變器輸出電壓基本波的線-線電壓大小成正比。其三角波與正弦波如下圖所示:
三相空間向量SVPWM:
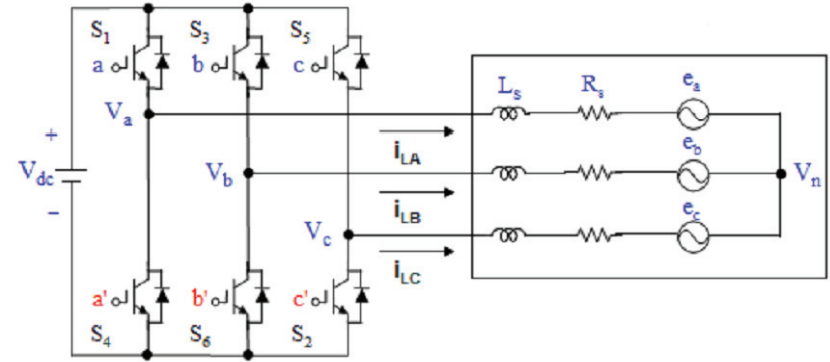
空間向量脈寬調變即是利用電壓空間向量的觀念,即由逆變器之六個功率組件的開關切換狀態來產生旋轉的電壓向量空間,典型的三相變頻器如圖所示,其每相各有兩個開關組件置于上臂及下臂,分別為上臂的S1、S3、S5及下臂的S2、S4、S6。在空間向量脈寬調變的控制模式下,逆變器每相開關組件的導通狀態為互補式,即代表若上臂導通則下臂截止,反之若上臂截止則下臂導通。在控制上通常在開關導通前加入一延遲時間以避免上臂與下臂功率組 件同時導通造成功率組件的損壞,此一延遲時間稱之為死區時間。在此定義開關導通狀態a、b、c相每一臂之開關導通狀態,若a=1則代表上臂開關導通下臂開關截止,a = 0則代表上臂開關截止下臂開關導通。因此三相逆變器之輸出狀態共有八種,每一種狀態產生的線對線電壓,相電壓之輸出結果(直流鏈電壓為VDC)列于下表。
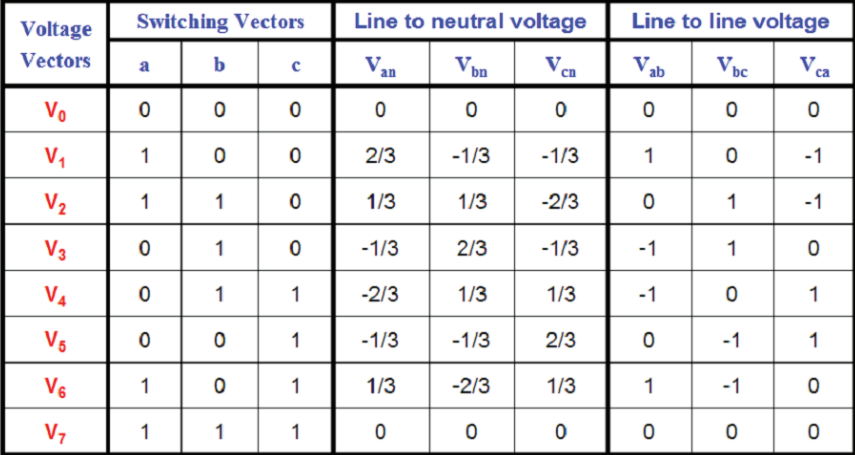
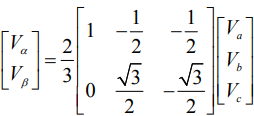
由上表可以得知,三相逆變器輸出之相電壓和線間電壓之關系,經由坐標軸轉換至αβ平面上可得下表,其轉換之關系式為:

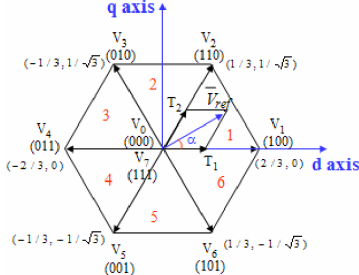
因此即由此八種開關切換狀態將可得到八種不同的電壓向量。此八個電壓向量稱為基本電壓向量,分別為六個有效電壓向量V1、V2、V3、V4、V5、V6及兩個零向量V0及V7。因此可利用此六個有效電壓向量將電壓空間平面分為六個區間,如下圖所示。其中αβ平面之α軸及β軸乃相對于交流馬達定子之水平軸及垂直軸, Vref則為輸出之參考電壓向量。
靜止坐標軸轉換:
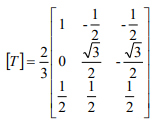
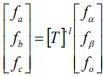
將三相abc靜止坐標軸轉換至αβ靜止坐標軸系統,此轉換稱為Clark轉換。依據下圖所示兩個坐標系統之間的關系,得出如下式的坐標轉換式:

fa、fb、fo為電壓及電流等在αβ軸下的變數量
fa、fb、fc為電壓及電流等在abc軸下的變數量

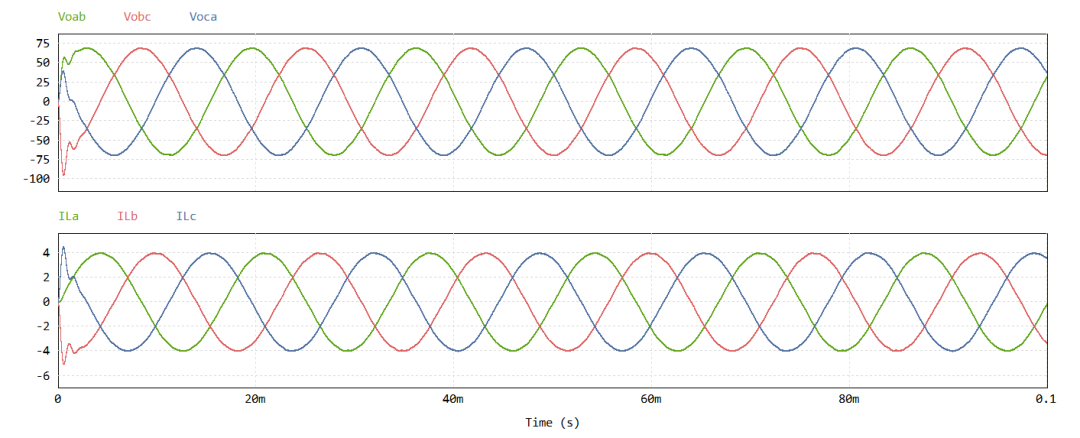
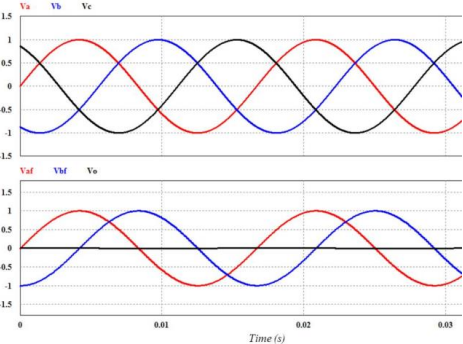
本文是采用非功率不變法則。此外,對于三相平衡系統,因此在做靜止坐標軸轉換時,零序分量是可被忽略的。下圖是采用PSIM仿真abc靜止坐標軸轉換至αβ靜止坐標軸之波形圖。
同步旋轉坐標軸轉換:
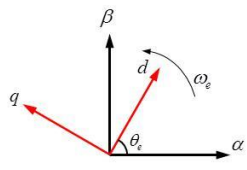
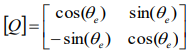
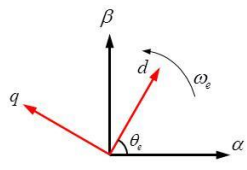
前一節透過坐標軸轉換將abc靜止坐標系統轉換至ab靜止坐標軸系統,本節進一步將αβ靜止坐標軸轉換至DQ同步旋轉坐標軸系統,此轉換稱為Park轉換,此時假設三相系統為平衡,零軸分量可被忽略,并將DQ軸與αβ軸同時放在二維向量平面上,如圖3.7 所示,此旋轉坐標以ωe角速度來旋轉,故可得坐標轉換公式:
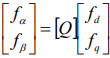
其中:
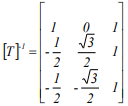
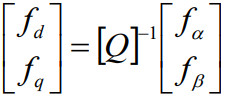
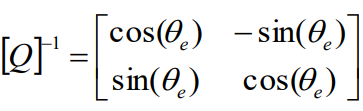
反之,將旋轉坐標系統DQ軸轉換至ab坐標系統,此轉換稱為反Park轉換,則轉換公式可表示:
實驗驗證: