
固緯電子電力電子教學小課堂 第二十六講:PEK-130模塊之 DSP ON OFF PEK-130 三相逆變器模組

PTS-系列之PEK-100系列教學
PEK-130模塊之
三相獨立逆變器
PEK-130
三相逆變器模組
簡 述:
三相獨立式逆變器的常見控制方式為PI雙閉環控制。由于PI對交流量無法實現無靜差追蹤,因此,需要將被控量進行坐標變換,轉換為對直流量的控制并且便于解耦合。考慮到逆變器對不平衡帶載時的電壓調整率,通常在電壓環增加一個電壓有效值環路。
三相三線式逆變器控制方法模型推導
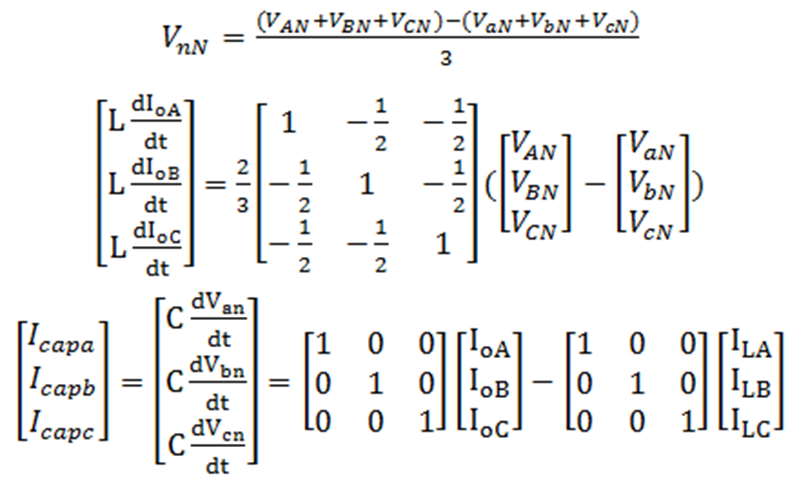
三相三線式的逆變器電路如圖二所示,其中n為電壓中性點。傳統的控制方法為采用雙回路電感電流控制即如圖二所示。
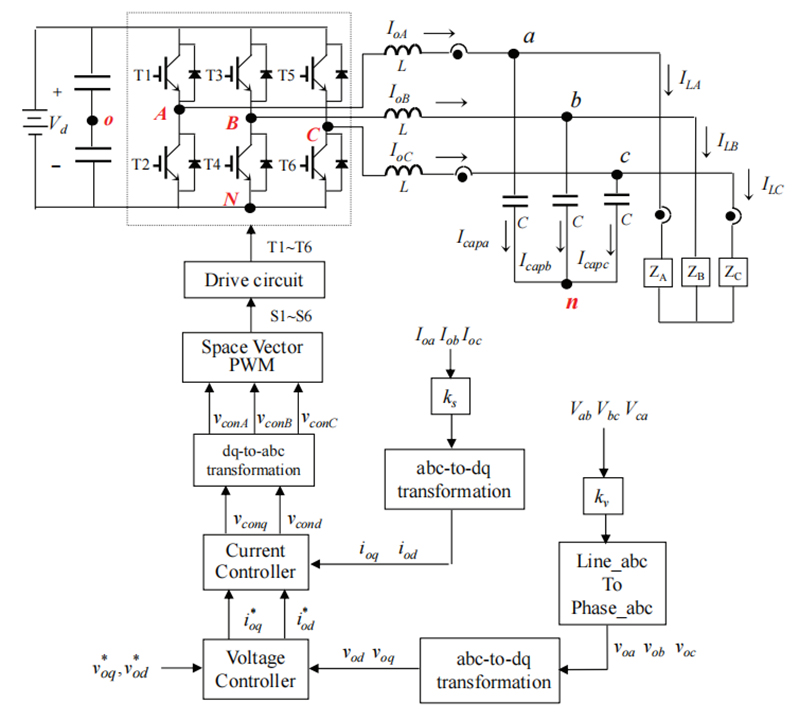
三相逆變器原理圖
由逆變器電路可得:
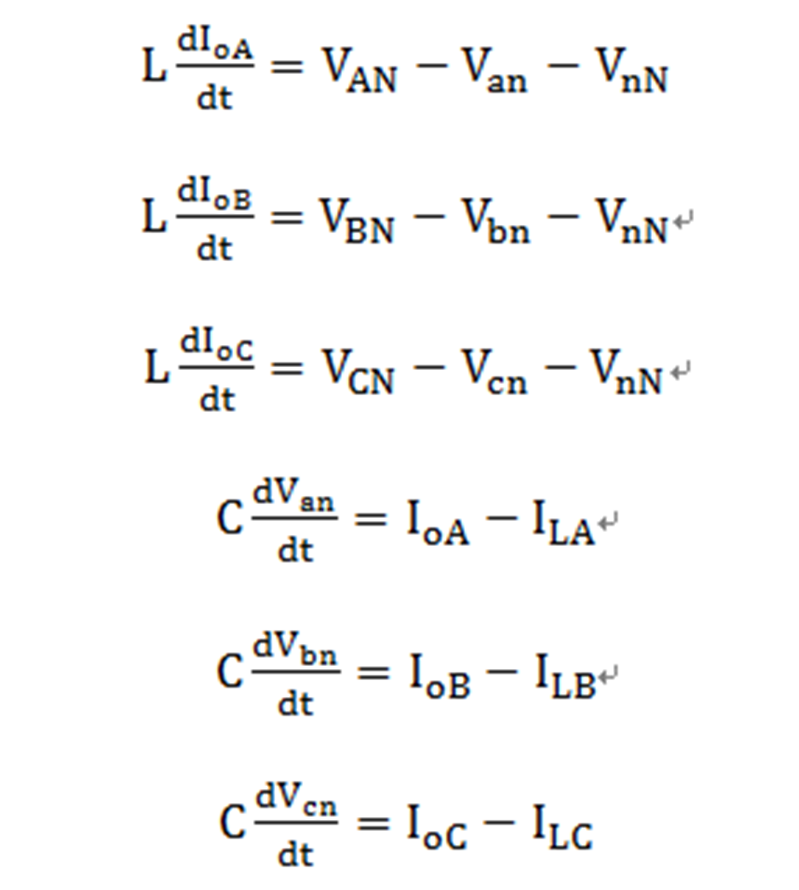
由于三線式電路滿足:
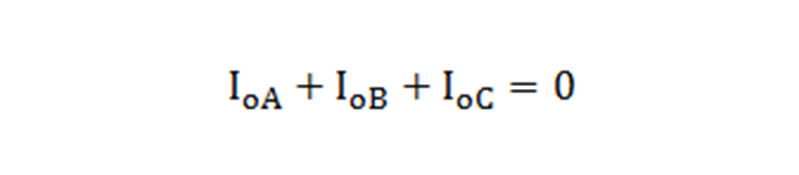
故:
逆變器最常采用的開關方式為三相正弦PWM,三相各臂使用相移120度的控制電壓分別與三角波比較獲得開關管的觸發信號。各臂的輸出電壓可表示為:

其中Vtm為三角波的振幅。

軸變換:
根據推導三相SPWM控制電壓與各相電流的關系可知,各相電流控制不僅受該相控制電壓決定,也受其他相控制電壓影響,同時各相電流也未解耦合,因此如果直接在abc靜止坐標系上設計控制器,在三相不平衡負載條件下,各相間將相互影響,控制的性能將受到影響。為了解決這一問題,一般常用的方法是利用坐標軸變換的方法將其數學模型進行解耦。如圖三所示的abc為三相靜止坐標系,可用以表示三相逆變器的相電壓和相電流等變量,而α和β是兩相靜止坐標系,可以將三相各相差120°的交流量轉換為兩相各差90°的交流量。在dq旋轉坐標系下可將三相交流量轉換為兩軸直流量。
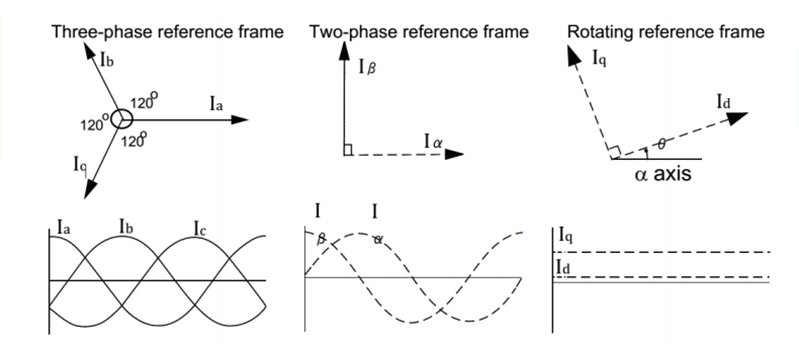
坐標變換示意圖
三相靜止坐標系到dq旋轉坐標系的變換公式為:


將電流電壓方程進行坐標變換,


控制器設計:
根據坐標變換后的電流方程可得電流環的控制框圖如圖四所示。由圖四可知,d、q軸分量之間存在耦合,可以通過前饋補償的方式消除此擾動。根據該流程框圖可以設計電流環控制器為Kp、PI或者二型控制器。
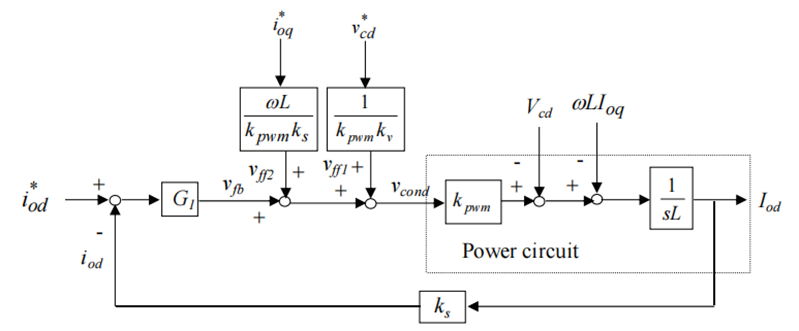
電流環d軸控制框圖
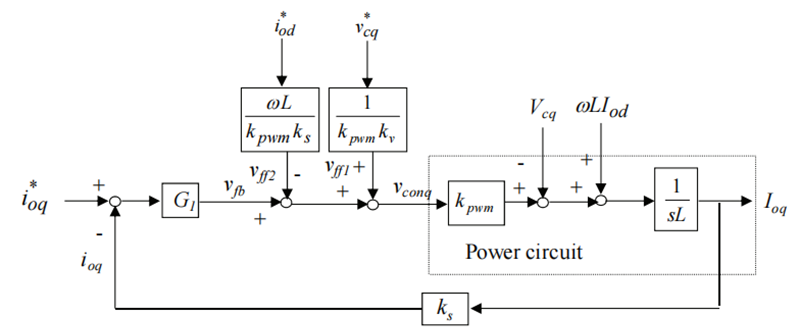
電流環q軸控制框圖
電壓環控制流程框圖如圖五所示。假設電流環的帶寬高于電壓環四倍以上,則電流環的響應在分析電壓環時可看作1。電壓環的設計與電流環類似,同樣可以通過前饋補償來抵消擾動。
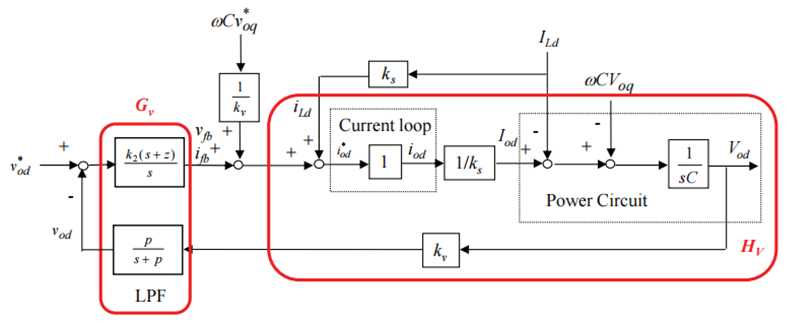
電壓環d軸控制框圖
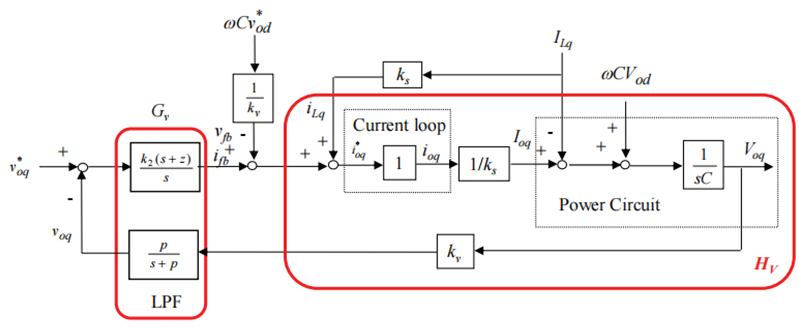
電壓環q軸控制框圖
為了獲得良好的電壓調整率,且在三相負載不平衡下也能獲得三相電壓平衡,則各個線電壓必須能夠分別調整RMS值。本文提出電壓均方根值控制器如圖六所示,其分別計算三相輸出線電壓的均方根值,再與均方根值的給定比較及經過補償器調整后產生一振幅修正信號,加上原來線電壓的振幅給定值,得到最終的線電壓振幅值。
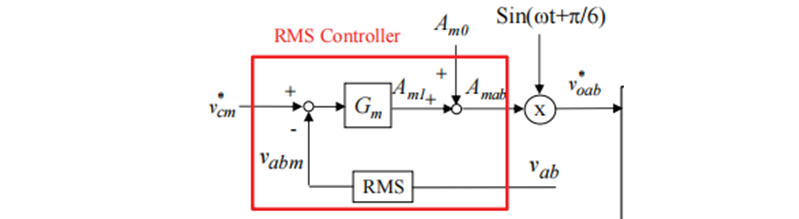
電壓均方根值控制框圖
仿真結果:
在psim環境下搭建的仿真圖如圖七所示,其中輸入為直流電壓100V,輸出相電壓有效值為40V,負載為三相不平衡負載(A:28.9*28.9/100Ω、B:28.9*28.9/100Ω、C:28.9*28.9/50Ω)。
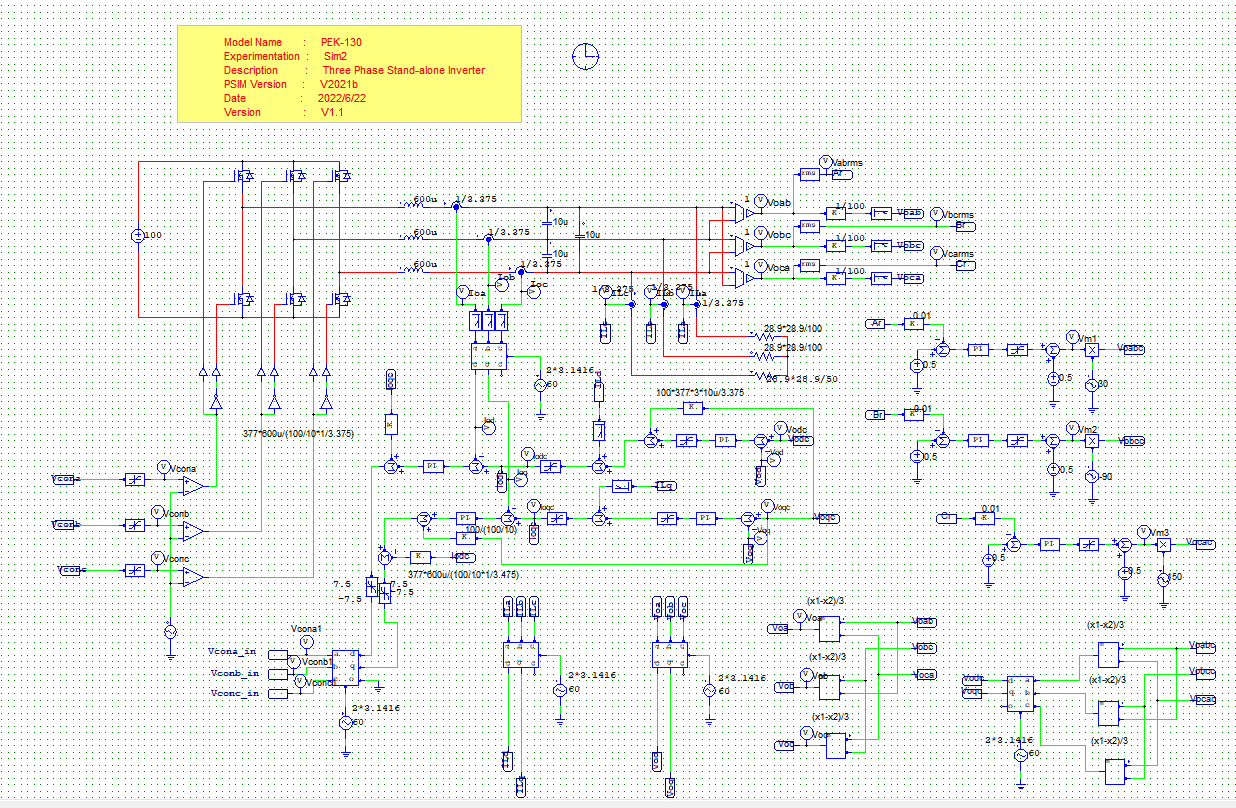
三相獨立逆變器仿真電路圖
輸出電壓(衰減倍數0.01)和負載電流(衰減倍數1/3.375)如圖八所示:
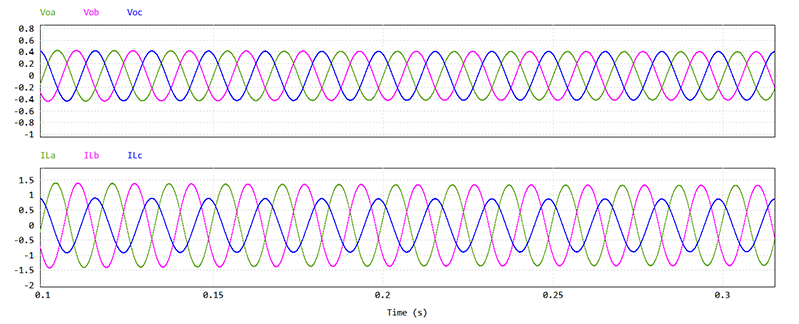
輸出電壓與負載電流
總 結:
通過以上分析設計與仿真,可以發現三相逆變器在不平衡負載情況下可以實現三相電壓平衡。